List of Engineering Projects and Design Solutions
NDAA Compliant Propulsion System
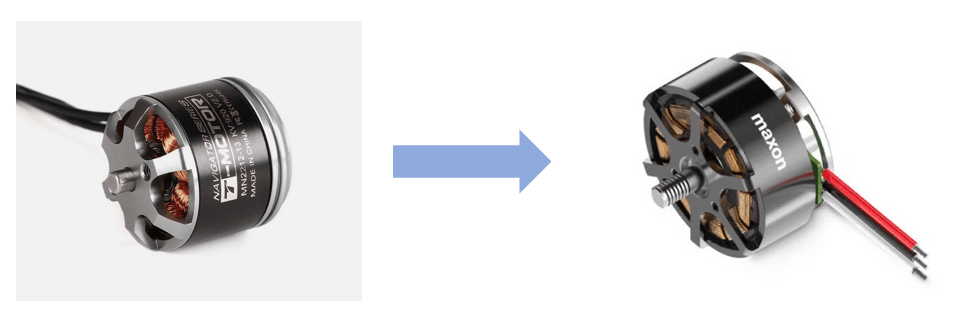
A key driver in the defense industry is to provide an unmanned system to customers that does not rely on chinese-sourced components.
As part of systems engineering team for an sUAS program I was tasked with coordinating development, testing, and validation of performance for a brushless motor adapted from an existing design. This involved both lab test and iterative refinement of the design with the manufacturer before system integration and flight test.

Brushless Gimbal Wiring Solution
Objective of program was to improve long range video quality by switching from servo to brushless motor driven gimbal.
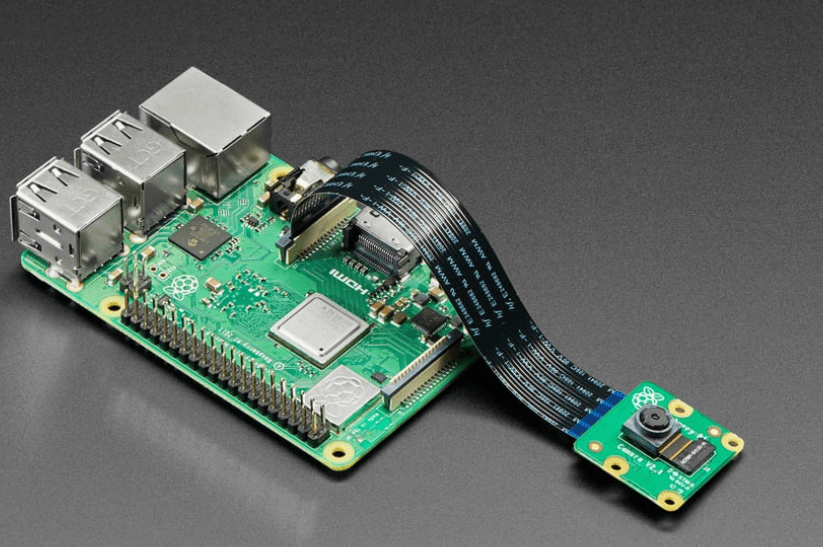
Previous sUAS design utilized Flat Flex Cable (FFC) for interface between Avionics and Payload Sensor (see RPi image for representative interface). Due to schedule constraints all components had to stay backwards compatible.
Excessive torque induced by FFC required an alternative so I proposed a composite FFC to microcoax design, defined the requirements for cable, then downselected manufacturer to fabricate for integration into new system.

Datalink Resolution
As Integrated Product Team Lead for Communications and User Interface I was tasked with resolving datalink issue with system.
I ran a small 6 person team of mechanical, embedded, and electrical engineers to investigate and improve both ground and air side communication components and mitigate co-located interference sources.
With the identified resolutions implemented the team validated the datalink met the system range specification and doubled data throughput even in challenging environments (e.g. over water transmission).

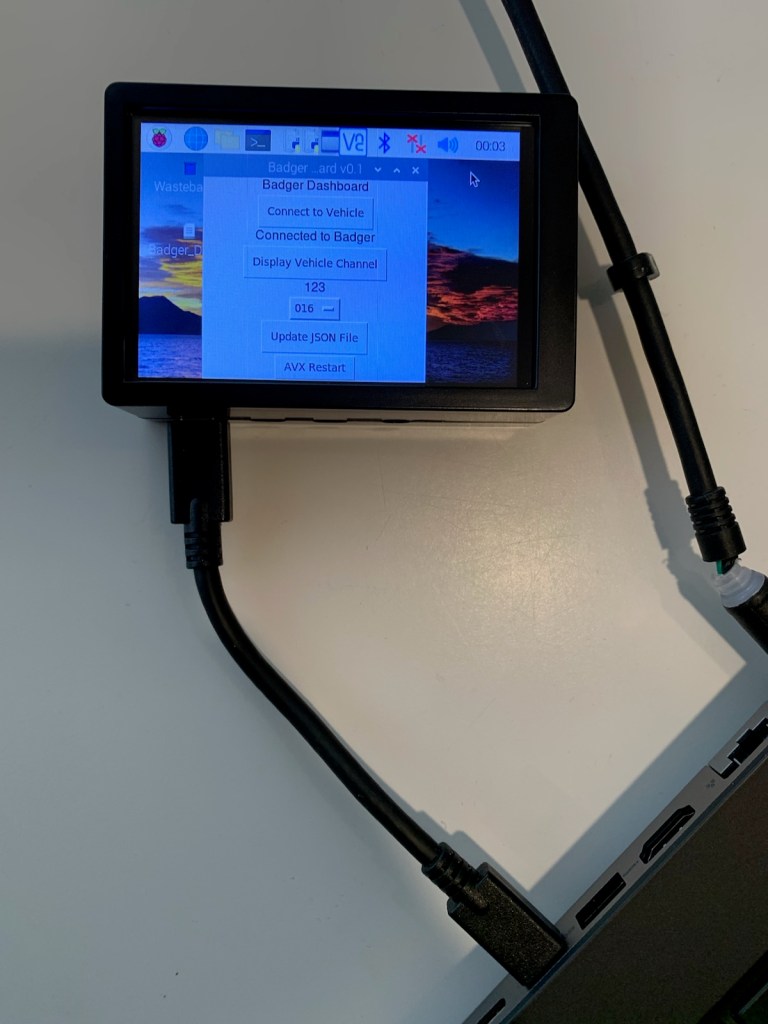
System Config
Device
System utilized custom datalink that required a manual channel selector onboard vehicle to switch channels however due to SWAP constraints channel selector could not be integrated. Vehicle was left on fixed channel/frequency.
As an alternative approach that required adding no additional weight or hotel load to vehicle I designed a simple device that included an RPi4 and touchscreen that could be powered from vehicle’s external interface port.
I included a simple Python based GUI that allowed operator to SSH into vehicle, modify radio config to an updated channel, then cycle onboard applications to allow vehicle to reboot on new frequency.
Operator could then disconnect device from vehicle external interface port and perform mission.